次の文は、公共測量における GNSS 測量機を用いた基準点測量において、電子基準点A,Bを既知点とした場合のセミ・ダイナミック補正について述べたものである。
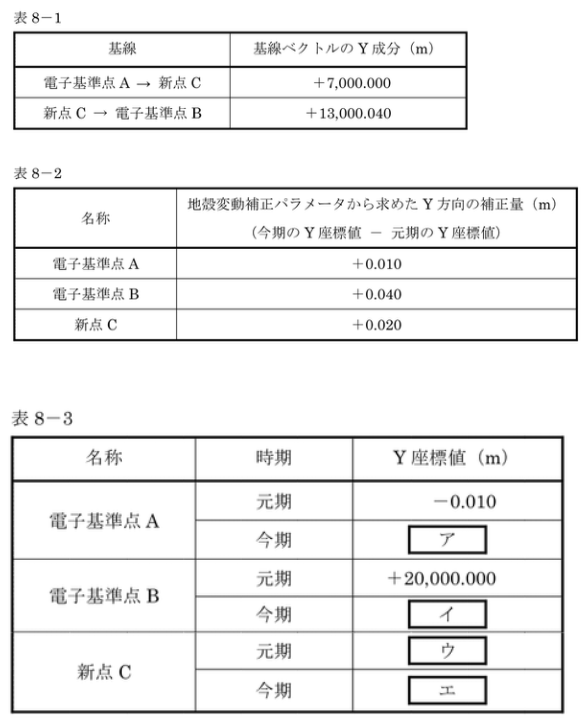
表8-1は、観測で得られた電子基準点Aから新点C及び新点Cから電子基準点Bまでの基線ベクトルのY成分を示したものである。表8-2は各点における地殻変動補正パラメータから求めた Y方向の補正量を示しており、元期座標値と今期座標値は、「今期座標値 = 元期座標値 + 地殻変動補正パラメータから求めた補正量」の関係がある。新点Cにおける元期のY座標値を求めるとき、表8-3の ア~エ に入る数値の組合せとして最も適当なものはどれか。次の1~5の中から選べ。
ただし、基線ベクトルの観測誤差並びにX方向及び楕円体高の補正量は考えないものとする。
なお、関数の値が必要な場合は、巻末の関数表を使用すること。
ア:-0.020, イ:+19,999.960, ウ:+6,999.960, エ:+6,999.980
ア:-0.020, イ:+19,999.960, ウ:+7,000.000, エ:+6,999.980
ア:0.000, イ:+20,000.020, ウ:+6,999.960, エ:+7,000.000
ア:0.000, イ:+20,000.040, ウ:+6,999.980, エ:+7,000.000
ア:0.000, イ:+20,000.040, ウ:+7,000.020, エ:+7,000.000